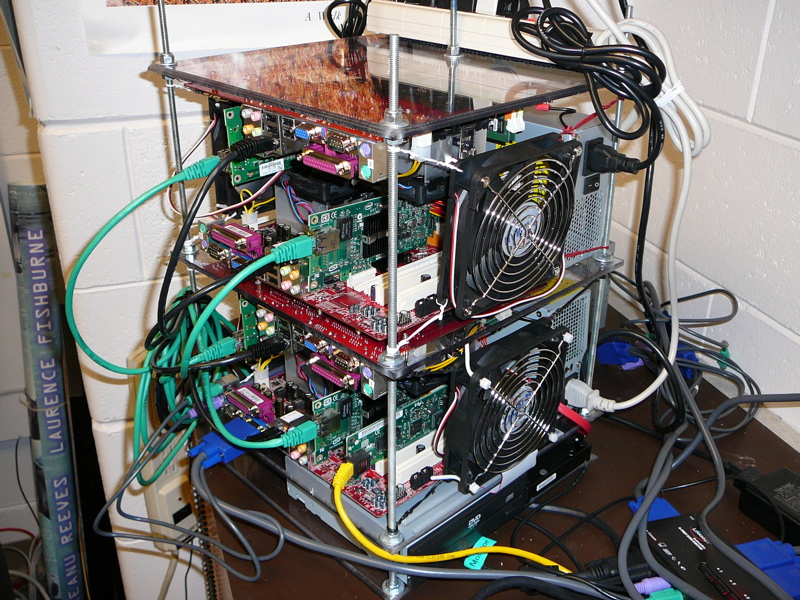
Microwulf: A Personal, Portable Beowulf Cluster
 MPI Homework Project 1: Getting Started With MPI
Threads Homework Project 1: Threads in C
MPI Homework Project 1: Getting Started With MPI
Threads Homework Project 1: Threads in C
Code:
/* pi.c - parallel C code to demonstrate Linux thread interface
* Original Source: www.tldp.org/HOWTP/Parallel_processing-HOWTO
* Since PI == 4 * arctan(1), and arctan(x) is the
* integral from 0 to x of (1/(1+x*x),
* the for loop below approximates that integration.
* Generalized by: Joel Adams
* Usage: ./a.out <numIntervals> <numThreads>
*/
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
/* global variables (shared by all threads */
volatile long double pi = 0.0; /* the approximation, to 31 sigfigs */
pthread_mutex_t piLock; /* how we synchronize writes to 'pi' */
long double intervals; /* how finely we chop the integration */
int numThreads; /* how many threads we use */
/* the function a thread executes
* Parameters: arg, a void* storing the address of the thread ID.
*/
void *computePI(void *id)
{
long double x,
width,
localSum = 0;
int i,
threadID = *((int*)id);
width = 1.0 / intervals;
for(i = threadID ; i < intervals; i += numThreads) {
x = (i+0.5) * width;
localSum += 4.0 / (1.0 + x*x);
}
localSum *= width;
pthread_mutex_lock(&piLock);
pi += localSum;
pthread_mutex_unlock(&piLock);
return NULL;
}
int main(int argc, char **argv)
{
pthread_t *threads; /* dynarray of threads */
void *retval; /* unused; required for join() */
int *threadID; /* dynarray of thread id #s */
int i; /* loop control variable */
if (argc == 3) {
intervals = atoi(argv[1]);
numThreads = atoi(argv[2]);
threads = malloc(numThreads*sizeof(pthread_t));
threadID = malloc(numThreads*sizeof(int));
pthread_mutex_init(&piLock, NULL);
for (i = 0; i < numThreads; i++) {
threadID[i] = i;
pthread_create(&threads[i], NULL, computePI, threadID+i);
}
for (i = 0; i < numThreads; i++) {
pthread_join(threads[i], &retval);
}
printf("Estimation of pi is %32.30Lf \n", pi);
printf("(actual pi value is 3.141592653589793238462643383279...)\n");
} else {
printf("Usage: ./a.out <numIntervals> <numThreads>");
}
return 0;
}